Self-driving vehicles: objective 2030

What is a self-driving and connected vehicle?
A self-driving or autonomous vehicle is one capable of assuming the tasks normally performed by a driver. To achieve this, it incorporates a series of sensors that, as it happens with other Internet of Things devices, facilitates the transmission and receival of information from other vehicles and the environment where it is driving. This connectivity is essential to guarantee safety and defines the different phases of the autonomy of a wheeled vehicle.
Classification of vehicles according to their degree of autonomy
According to the standard defined by the Society of Automotive Engineers (SAE) of the United States and accepted globally, self-driving vehicles are classified according to the following characteristics:
Level 0
It is the starting point and responds to driving as we’ve been experiencing in recent decades. The driver is in command and although it includes active safety systems such as Stability Control (ESP) or the Anti-Lock System (ABS), these are not enough for the vehicle to be considered self-driving.
Level 1
The vehicle begins to have semi-automatic functionalities such as cruise control or lane assist, which help to keep the vehicle in lane.
Requirements: The vast majority of cars sold today already have one or more Level 1 self-driving systems.
Level 2
This level introduces certain automation with features such both cruise control and steering wheel control. There is still the need for a person to be at the wheel to take control of the car at any time. The most widespread examples of semi-automatic technologies are adaptive cruise control or automatic parking systems, in which the car takes control of the steering wheel and the pedals to park the car.
Requirements: Unlike Level 1, both systems must be present.
Release Date: Tesla Autopilot and Cadillac (General Motors) Super Cruise systems qualify as Level 2, 2+. The Mercedes E-Class, released in 2016, already featured the Drive Pilot system, capable of staying in its lane.
Imagen 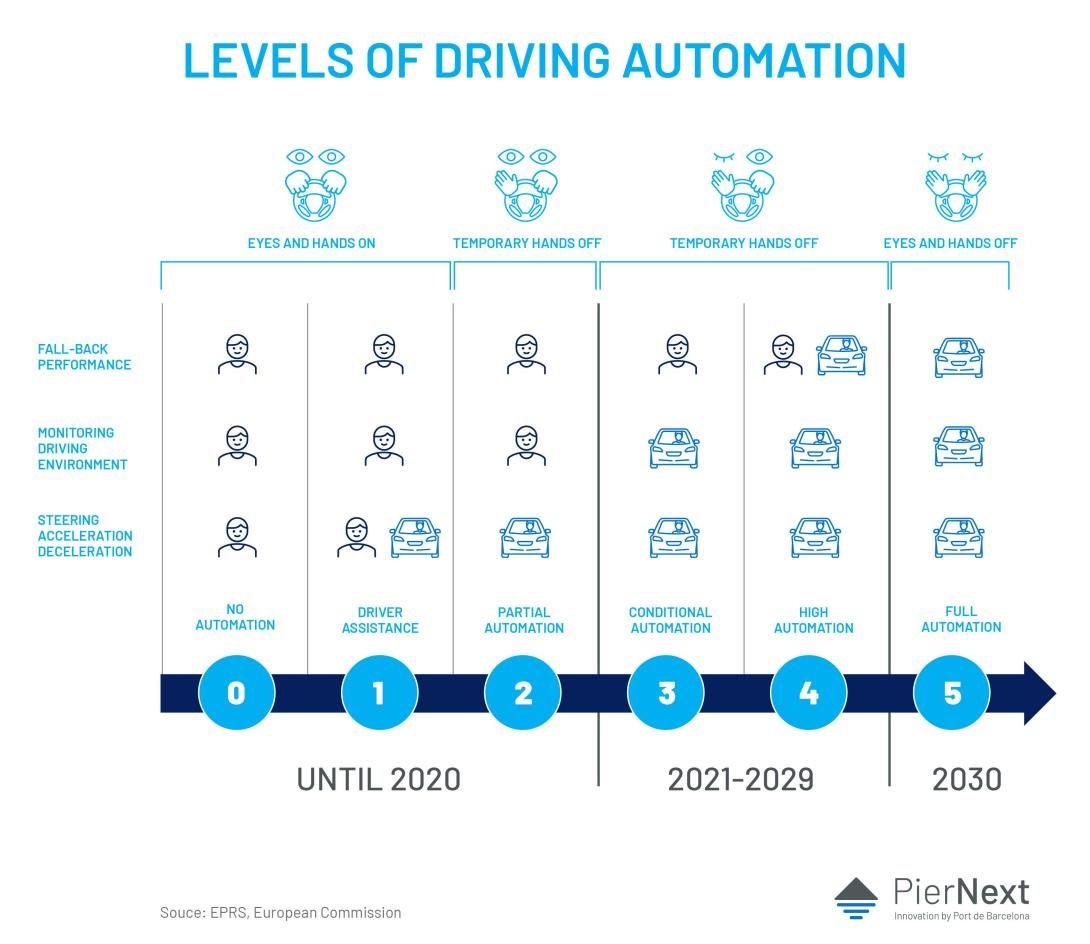 Level 3
Level 3
The jump from Level 2 to Level 3 is substantial from a technology perspective, but subtle from a human perspective.Level 3 vehicles have more advanced environmental sensing capabilities and can make informed decisions on their own, such as accelerating to overtake a slow vehicle. However, the driver must remain alert at all times in case he or she must take control if the system is unable to perform a task.
Requirements: The US and China have the most permissive legislation and already allow the application of this category. However, the European legal framework is more restrictive for its introduction.
Launch date: In March 2021, Honda launched 100 units of the Legend model, classified as a Level 3 self-driving vehicle. It incorporates the Traffic Jam Pilot function, which allows the driver to release the wheel and disengage from driving in specific circumstances.
Level 4
Cameras and sensors constantly monitor what is happening inside and outside the vehicle, guiding its occupants to their destination. The driver only has to indicate its destination and the car will drive autonomously if operating conditions are met, such as being on a highway. Although the driver can take control of the car whenever needed, this should not be necessary for practically the entire journey, since the car would respond to the unforeseen with a safe maneuver.At this level, the vehicle is capable of communicating with other cars (V2V) and with the infrastructures (V2I) where it circulates.
Requirements: The vehicle must have a very high capacity to detect and understand its environment, therefore, the number of sensors increases. Systems must be redundant.
Release date: Expected before 2030.
Level 5
Level 5 vehicles do not require human attention as full automation will have been achieved in all environments, whether urban or interurban, and in any weather circumstance or external events. It will not be necessary for the cars to have a steering wheel or pedals, since the driver will just be a passenger.Thanks to technologies such as laser, radar, global positioning systems or computerized camera vision, the car will obtain a 360-degree view of its surroundings.
Requirements: This level of automation requires the approval of a specific legal framework.
Release date: Expected for 2030 onwards.
Starting at Level 4 of automation, connectivity must include the infrastructures where autonomous vehicles will be driving
The challenges of autonomous mobility
Connectivity presents a number of challenges that manufacturers and authorities must address.
- Cybersecurity. It is necessary to guarantee the anti-hacking of the vehicles, as well as the communications with the infrastructure to prevent false or manipulated information which can force the vehicle to make the wrong decisions.
- Validation of Artificial Intelligence (AI) algorithms so the vehicle can react to situations it has never experienced which can put the safety of the driver and others at risk. Vehicle testing is also one of the biggest challenges.
- They must be commercially viable vehicles. The use of such sophisticated equipment implies a price increase that would classify these cars as high range and, therefore, do not adapt to the market’s average prices.
- Legal aspects. At a development level, the United States and China lead over Europe. Thanks to its ecosystem of companies, the US is a pioneer in integrating AI into vehicles and has greater agility to authorize tests and homologate the different phases of the self-driving vehicle. China's commitment to the autonomous vehicle translates into even stronger legislation than the United States.
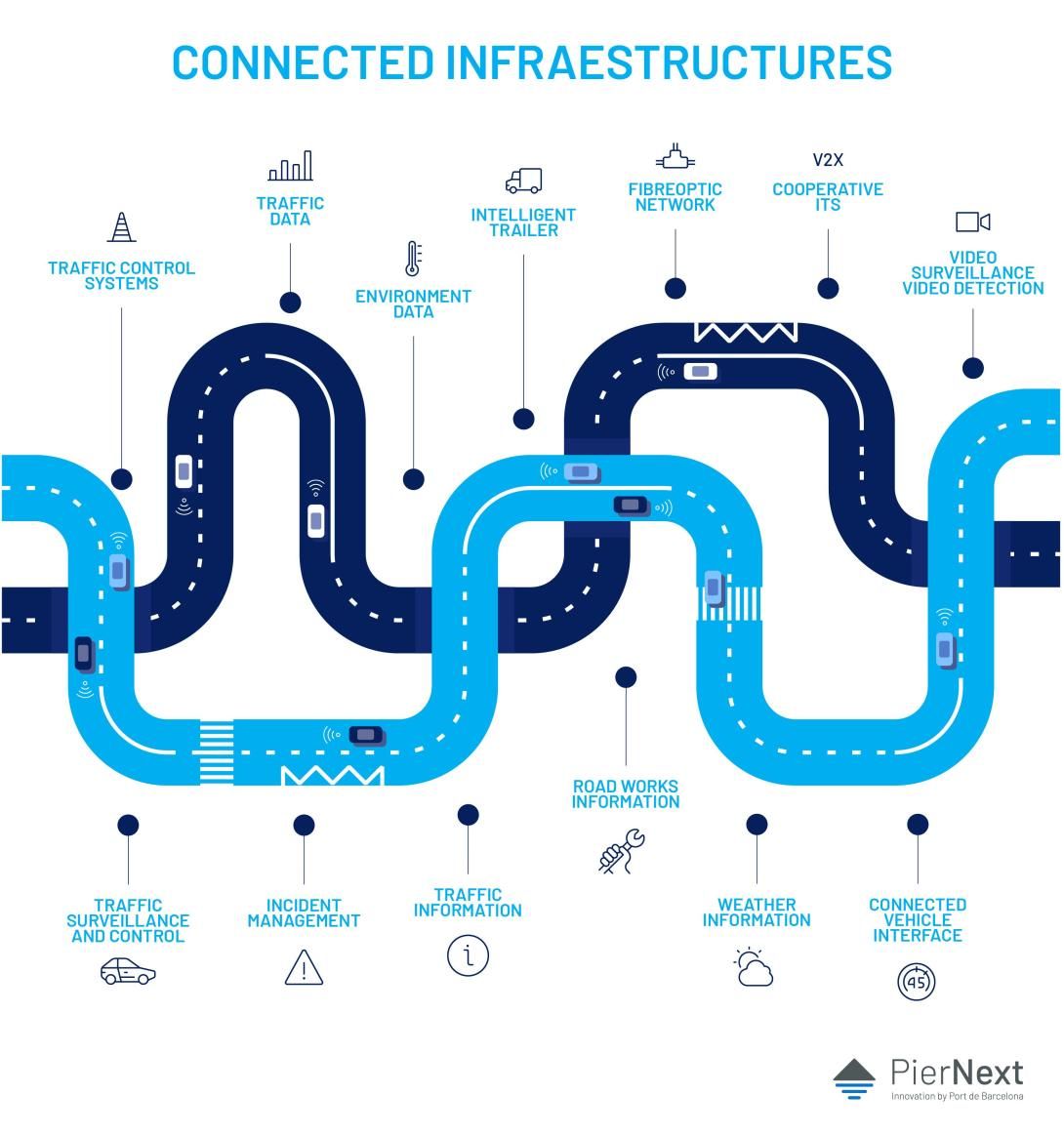
A self-driving vehicle needs a connected infrastructure
In order to achieve full automation, it is necessary that vehicles, in addition to communicating with each other, can do the same with the infrastructures where they circulate. Currently, the roads are passive and the vehicle adapts to its circumstances.
Roads must be equipped with cameras and sensors to process the information transmitted by the vehicle, such as its position, and to communicate with it, alerting it, for example, that there has been an accident several kilometers away.
These devices are communication modules established according to protocols that are already well defined, although their implementation is lacking.
The phases of connected infrastructures
- Conventional infrastructures
Without any support for autonomous driving, digital maps with information about the signage are available. The process of understanding its surroundings, the road, is left to the vehicle.
- Digital infrastructures
Infrastructure begins to play a more active role. First, influencing traffic with variable messaging panels and dynamic information such as traffic jams, accidents or weather sent digitally to autonomous vehicles. Finally, a more advanced level of digitalization would still make it possible to manage traffic at a “microscopic” level, such as the situation of vehicles and sending cooperative information to self-driving vehicles, such as speed or route recommendations.
Challenges of connected infrastructures
- To be able to equip new or existing infrastructure with all the sensorisation and communication elements required to facilitate V2V and V2I communications.
- Mobile communications must have high-speed, low-latency and high-availability that allow the implementation of IoT architectures adapted to the road.
- Obtaining reliable information of the physical and environmental conditions of the route in real time.
The technologies used in the development of self-driving vehicles are born from avionics, the first industry to include an electronic interface that automates certain phases of the flight, performed by the pilot or autopilot, and which introduced the concept of redundancy: the duplication of certain critical components so that, in case of failure, there is always an alternative. Now it is the turn of the wheeled vehicles. In our leisure time, work trips and, increasingly, applied in logistics, industry and transport.
More information:
Society of Automotive Engineers
Road infrastructure support levels for automated driving