Vehicle autònom: objectiu 2030

Què és un vehicle autònom i connectat?
Un vehicle autònom és aquell capaç d'assumir les tasques que normalment realitza un conductor. Per a aconseguir-ho, incorpora una sèrie de sensors que, tal com succeeix amb altres dispositius de la Internet of Things, permeten que transmeti i rebi informació d'altres vehicles i de l'entorn on està circulant. Aquesta connectivitat és fonamental per a garantir la seguretat i defineix les diferents fases d'autonomia d'un vehicle rodat.
Classificació dels vehicles segons el seu grau d'autonomia
Segons l'estàndard definit per la Societat d'Enginyers d'Automoció (SAE, per les seves sigles en anglès) dels Estats Units i acceptat globalment, els vehicles autònoms es classifiquen segons les següents característiques:
Nivell 0
És el punt de partida i respon a la conducció tal com s'ha desenvolupat en les últimes dècades. El conductor està al comandament i encara que inclou sistemes de seguretat activa com el Control d'Estabilitat (ESP, per les seves sigles en anglès) o el Sistema Antibloqueig de Rodes (ABS, per les seves sigles en anglès), aquests no són suficients perquè el vehicle es consideri automatitzat.
Nivell 1
El vehicle comença a comptar amb funcionalitats semiautomàtiques com el control de creuer o assistent de línies de carril, que contribueixen a mantenir el vehicle en el carril pel qual circula.
Requisits: La gran majoria dels cotxes que es venen en l'actualitat ja compten amb un o diversos sistemes de conducció autònoma de nivell 1.
Nivell 2
En aquest nivell es comença a tenir ja automatització, gràcies als sistemes de control de creuer i control del volant (seguiment de línia de carril). Continua sent necessari una persona al volant que pugui prendre el control de l'automòbil en qualsevol moment. Els exemples més estesos de tecnologies semiautomàtiques són el control de creuer adaptatiu o els sistemes d'aparcament automàtic, en els quals el cotxe pren el control del volant i dels pedals per a aparcar el cotxe.
Requisits: Tots dos sistemes han de ser presents, a diferència del Nivell 1 en què hi havia l'un o l'altre.
Data de llançament: Els sistemes Tesla Autopilot i Cadillac (General Motors) Super Cruise qualifiquen com a Nivell 2, 2+. El Mercedes Clase E, que va sortir al mercat en 2016 comptava ja amb el sistema Drive Pilot, capaç de mantenir-se en el seu carril.
Imatge 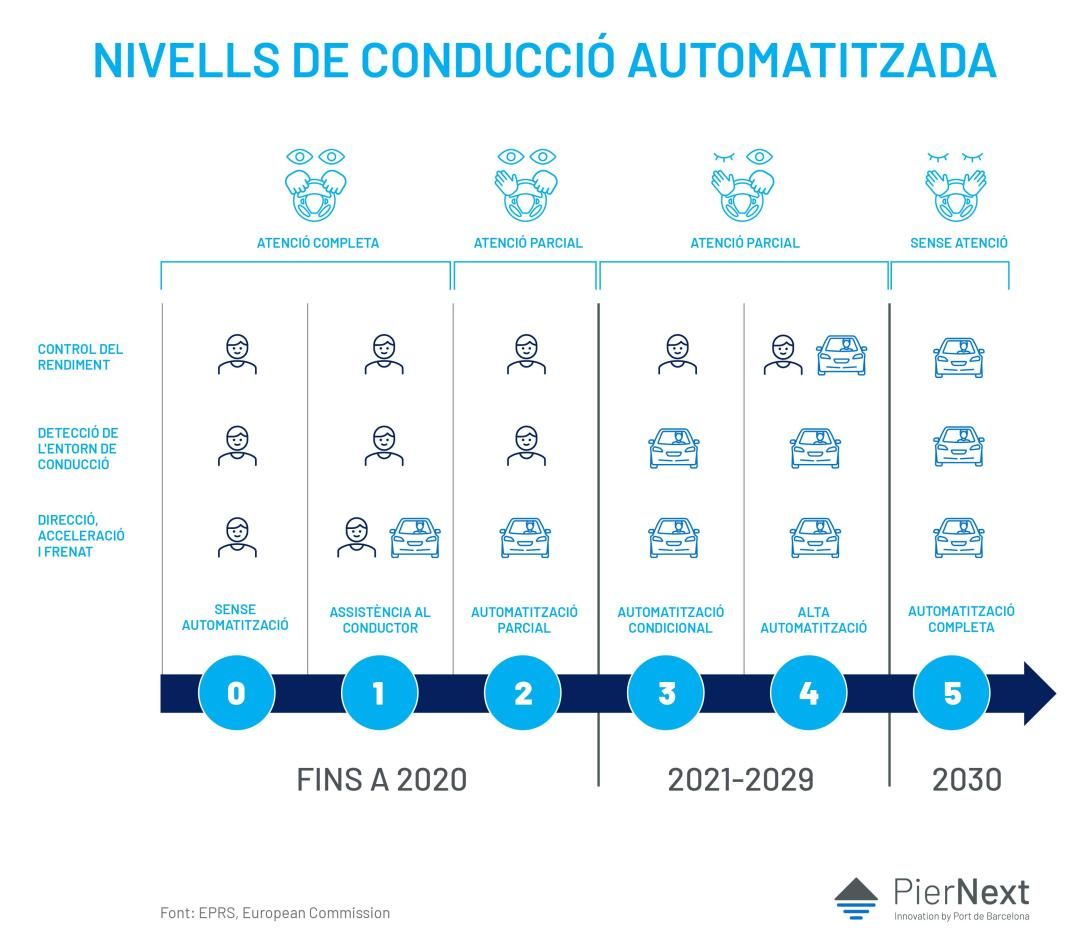 Nivell 3
Nivell 3
El salt del Nivell 2 al Nivell 3 és substancial des d'una perspectiva tecnològica, però subtil des d'una perspectiva humana.Els vehicles de Nivell 3 tenen capacitats més avançades de detecció de l'entorn i poden prendre decisions informades per si mateixos, com accelerar per a passar un vehicle que circula lentament. No obstant això, el conductor ha de romandre alerta en tot moment per si ha de prendre el control si el sistema no pot executar qualsevol tasca.
Requisits: els EUA i la Xina compten amb la legislació més permissiva i permet ja l'aplicació d'aquesta categoria. No obstant això, el marc legal europeu és més restrictiu per a la seva introducció.
Data de llançament: Honda va llançar 100 unitats del model Legend, catalogat com un vehicle autònom de Nivell 3, al març de 2021. Incorpora la funció Traffic Jam Pilot, que permet al conductor deixar anar el volant i desentendre's de la conducció en unes circumstàncies concretes.
Nivell 4
Les càmeres i sensors monitoren constantment el que succeeix dins i fora del vehicle, guiant als ocupants cap al seu destí. El conductor només ha d'indicar el lloc on vol desplaçar-se i el cotxe funcionarà de manera autònoma si es compleixen les condicions operatives, com per exemple, estar en una autopista. Encara que el conductor pot prendre el control del cotxe en el moment que vulgui, no hauria de ser necessari en pràcticament tot el trajecte, ja que el cotxe respondria als imprevistos amb una maniobra segura.En aquest nivell el vehicle és capaç de comunicar-se amb altres cotxes (V2V) i amb les infraestructures (V2I) per les quals circula.
Requisits: El vehicle ha de tenir una molt alta capacitat de detectar i entendre el seu entorn, per això, la quantitat de sensors s'incrementa. Els sistemes han de ser redundants.
Data de llançament: Prevista per a abans de 2030.
Nivell 5
Els vehicles de Nivell 5 no requereixen atenció humana ja que s'haurà aconseguit l'automatització plena en tots els entorns, ja siguin urbans o interurbans, i en qualsevol circumstància climàtica o esdeveniment extern. No serà necessari que els cotxes tinguin volant o pedals, ja que el conductor serà un ocupant més.Gràcies a tecnologies com el làser, el radar, el sistema de posicionament global o la visió de càmeres automatitzades, el cotxe obtindrà una visió de 360 graus del seu entorn.
Requisits: Aquest nivell d'automatització requereix de l'aprovació d'un marc legal específic.
Data de llançament: Prevista per a 2030 d'ara endavant
A partir del Nivell 4 d'automatització, la connectivitat ha d'incloure les infraestructures per les quals circularan els vehicles autònoms
Els reptes de la mobilitat autònoma
La connectivitat presenta una sèrie de desafiaments als quals han de donar resposta els fabricants i les autoritats.
- Ciberseguretat. Cal garantir l'anti-hackeo dels vehicles, així com les comunicacions amb les infraestructura per a evitar que informació falsa o manipulada obligui el vehicle a prendre decisions errònies.
- Validació dels algorismes d'Intel·ligència Artificial (IA) perquè el vehicle pugui reaccionar davant situacions que no ha experimentat i que poden posar en risc la seguretat del conductor i d'altres persones. Aquest punt inclou el testatge del vehicle com un dels majors reptes.
- Que siguin vehicles comercialment viables. L'ús d'equips tan sofisticats implica un increment del preu que situaria a aquests cotxes en una gamma alta i que, per tant, no s'adapten als preus mitjans de mercat.
- Aspectes legals. A nivell de desenvolupament, els Estats Units i la Xina porten a la davantera a Europa. El primer, gràcies al seu ecosistema d'empreses, és pioner a integrar la IA als vehicles i té major agilitat per a autoritzar proves i homologar les diferents fases del vehicle autònom. L'aposta xinesa pel vehicle autònom es tradueix en una legislació encara més sòlida que l'estatunidenca.
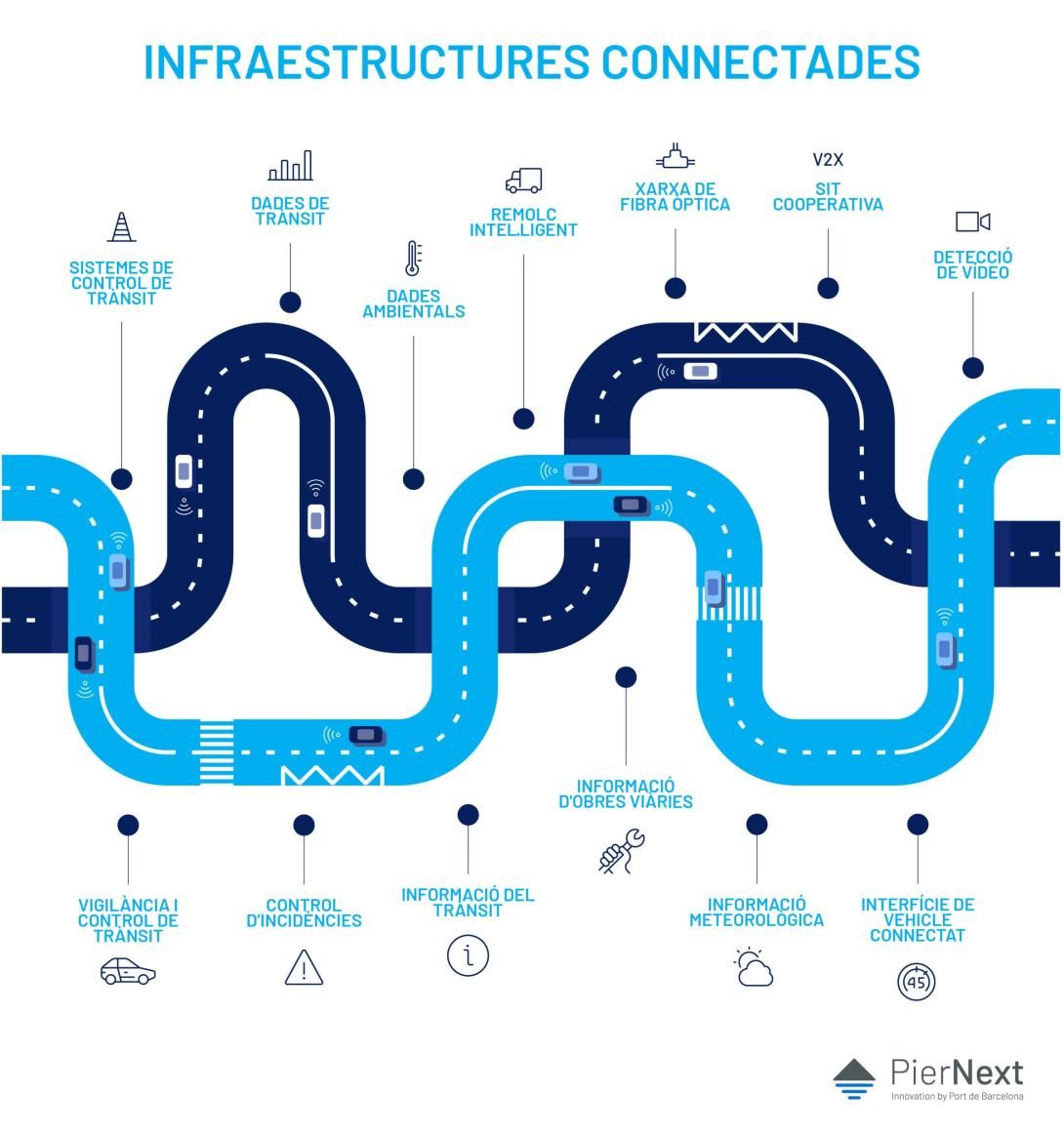
Un vehicle autònom necessita una infraestructura connectada
Per a aconseguir la plena automatització és necessari que els vehicles, a més de comunicar-se entre ells, puguin fer-ho amb les infraestructures per les quals circulen. Actualment, les carreteres són passives i el vehicle s'adapta a les seves circumstàncies.
Per a això, cal dotar de càmeres i sensors a les carreteres perquè puguin processar la informació que transmet el vehicle, com la seva posició, i comunicar-se amb ell alertant-li, per exemple, que hi ha hagut un accident a diversos quilòmetres de distància.
Aquests dispositius són mòduls de comunicacions establerts segons uns protocols que ja estan bastant definits, encara que falta la seva implementació.
Les fases de les infraestructures connectades
- Infraestructures convencionals
Sense cap mena de suport a la conducció autònoma, existeixen mapes digitals amb informació sobre la senyalització. Es deixa al vehicle el procés d'entendre el seu entorn, la carretera.
- Infraestructures digitals
La infraestructura comença a jugar un paper més actiu. Primer, influint en el trànsit amb panells de missatgeria variable i informació dinàmica com a embussos, accidents, climatologia enviada de manera digital als vehicles autònoms. Finalment, un nivell de digitalització més avançat encara permetria gestionar el trànsit a nivell “microscòpic”, com a situació dels vehicles i enviant informació cooperativa als vehicles autònoms, com per exemple recomanacions de velocitat o ruta.
Reptes de les infraestructures connectades
- Poder dotar a una infraestructura nova o existent de tots els elements de sensorización i comunicació requerits per a facilitar la comunicació V2V i V2I
- Disposar de comunicacions mòbils d'alta velocitat, baixa latència i alta disponibilitat que permetin implementar les arquitectures del IoT adaptades a la via.
- Obtenció fiable de les condicions físiques i ambientals de la ruta en temps real.
Les tecnologies emprades en el desenvolupament dels vehicles autònoms neixen de l'aviònica, la primera indústria que va incloure una interfície electrònica que automatitza unes certes fases del vol, realitzades pel pilot o pilot automàtic, i del concepte de redundància: la duplicació d'uns certs components crítics perquè, en cas d’error, sempre existeixi una alternativa. Ara és el torn dels vehicles rodats. En el nostre oci, en els desplaçaments de treball i, cada vegada més, aplicats en logística, indústria i transport.
Més información:
Societat d'Enginyers d'Automoció
Road infrastructure support levels for automated driving